CLASIFICACIÓN DE LOS PIROMETROS DE RADIACIÓN
Los pirómetros se pueden clasificar en:
1. Instrumentos de banda ancha.
2. Instrumentos de banda angosta.
3. Pirómetros de razón (o de dos colores).
4. Pirómetros ópticos.
5. Instrumentos de fibra óptica.Como se describen en la Tabla 2 y se explican a continuación.
 1. Pirómetros de banda ancha.
1. Pirómetros de banda ancha.
Son los más simples y baratos. Se denominan también pirómetros de radiación total porque responden a una zona muy amplia del espectro de la radiación, abarcando longitudes de onda desde 0,3[μ m] hasta 2,5[μ m] ó 20[μ m], midiendo una fracción considerable de la radiación total emitida por el objetivo.
2. Pirómetros de banda angosta.
Estos pirómetros tienen una respuesta en longitud de onda relativamente angosta y cuidadosamente seleccionada, a menudo para satisfacer requerimientos específicos. Los pirómetros ópticos se pueden considerar como un caso especial de esta categoría.
3. Pirómetros de razón.
Un termómetro de razón es, en esencia, dos pirómetros combinados, aunque compartan varios elementos en común (como los lentes y el detector), y cuyas respuestas en longitud
de onda son distintas. De estos pirómetros se obtiene una señal que es el cuociente de las respuestas individuales de los
pirómetros.
La idea de los pirómetros de razón es que la señal “cuociente” depende de la temperatura, pero es relativamente
independiente del tamaño del objetivo y de su distancia al mismo, a diferencia de los demás tipos de pirómetros.
Asimismo, si la emisividad del objetivo es la misma para las dos longitudes de onda del instrumento, la medición resulta independiente de esta cantidad (o del cambio de la misma).
Éste es el caso para algunos materiales, pero no para metales oxidados, cuya emisividad es muy dependiente de la longitud de onda.
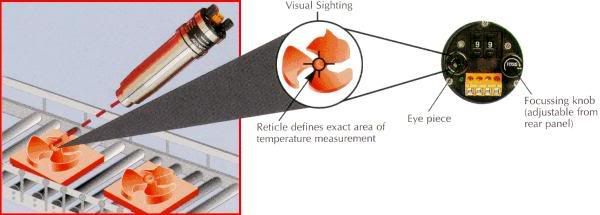
4. Pirómetros ópticosSon instrumentos que contrastan la radiación térmica del objetivo con la proveniente de una fuente interna, para lograr una medida de la temperatura. La idea es medir la intensidad de la radiación que proviene del objetivo, para un intervalo muy angosto de longitudes de onda.
Estos pirómetros tienen una lámpara incandescente, generalmente de tungsteno, alimentada por una fuente que regula su luminosidad; un sistema óptico encargado de superponer la luz de la lámpara y la del objetivo para que puedan ser vistos simultáneamente; un filtro rojo que deja pasar la luz de λ > 650 [nm] y que junto con el ojo humano, proporcionan el intervalo de longitud de onda necesario; y un filtro de absorción para temperaturas sobre 1300ºC para alargar la vida útil del filamento de tungsteno. El esquema de un pirómetro óptico se muestra en la Fig. 1.

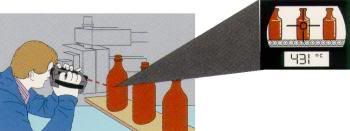
Para tomar una medición, se observa a través del ocular (9) y se ajusta manualmente, al menos en primera instancia, la intensidad de la lámpara hasta que ésta sea indistinguible de la radiación del objetivo. De esta forma, la corriente hacia el filamento es traducida a una temperatura de brillo TB. Debido a que el filamento no es un cuerpo negro ideal, la temperatura del objetivo, T, puede obtenerse con algunas aproximaciones, en las cuales debe considerarse la emisividad del material y la transmisión del sistema óptico completo.
Para prescindir de la opinión subjetiva del ojo humano, se emplean mecanismos de control automático para realizar la medición, usando un tubo fotomultiplicador.
5. Pirómetros de fibra óptica
La fibra óptica es usada para servir de guía a la radiación emitida por los cuerpos y conducirla lejos de los lugares donde el calor provoca que el sistema de medición no funcione correctamente.
La capacidad de la fibra está limitada a 2 [μm] de longitud de onda, por lo que sólo puede medir temperaturas mayores que 93ºC. Se usan en lugares de acceso dificil o donde los campos electromagnéticos afectan a los equipos electrónicos; por ejemplo, dentro de motores, turbinas o tubos al vacío.
CONSTRUCCIÓN DE LOS PIRÓMETROS DE RADIACIÓN
Los pirómetros de radiación para uso industrial, fueron introducidos hacia 1902 y desde entonces se han construido de diversas formas. El medio de enfocar la radiación que le llega puede ser una lente o un espejo cóncavo; el instrumento suele ser de "foco fijo" o ajustable en el foco, y el elemento sensible puede ser un simple par termoeléctrico en aire o en bulbo de vacío o una pila termoeléctrica de unión múltiple en aire. La fuerza electromotriz se mide con un milivoltímetro o con un potenciómetro, con carácter indicador, indicador y registrador o indicador, registrador y regulador.
El espejo cóncavo es a veces preferido como medio para enfocar por dos razones:
1) la imagen de la fuente se enfoca igualmente bien en el receptor para todas las longitudes de onda, puesto que el espejo no produce aberración cromática, en tanto que la lente puede dar una imagen neta para una sola longitud de onda.
2) las lentes de vidrio o de sílice vítrea absorben completamente una parte considerable de la radiación de largas longitudes de onda. La radiación reflejada por el espejo difiere poco en longitud de onda media de la que en él incide.
a. TIPO ESPEJO
En la FIGURA siguiente se presenta esquemáticamente los rangos ópticos de un pirómetro de radiación moderno del tipo de espejo. La radiación entra, desde una fuente, a través de una ventana A de sílice vítrea, es reflejada por el espejo esférico B y llevada a un foco sobre el diafragma J, en el centro del cual hay una abertura C.

La radiación que pasa a través de C es reflejada por el espejo esférico D hacia el receptor E, donde se forma una imagen de C. La superficie de J se blanquea ligeramente con óxido de magnesio para que refleje difusamente suficiente luz que haga visible la imagen de la fuente cuando se mira a través de una lente H colocada detrás de B. El instrumento es orientado por el observador de manera que la imagen de la porción de la fuente que ha de ser mirada, cubra la abertura C. Dado que B no produce ninguna aberración cromática y muy poca aberración esférica, la imagen de la fuente, colocada a la distancia para la cual está enfocado el espejo, es muy neta y puede hacerse que una porción muy definida de la imagen cubra C.
La relación de la distancia de la fuente al diámetro requerido por la fuente (factor distancia) es aproximadamente de 24 a 1 para distancias mayores de 24 pulgadas. En 24 pulgadas, el diámetro de la fuente debe ser por lo menos de 1 pulgada; en 48 pulgadas, de 2 pulgadas, etc.
Para distancias más cortas de la fuente, el factor distancia es más largo.
Para distancias mayores de 20 pulgadas, el instrumento puede emplearse como de "foco universal" si está debidamente enfocado y graduado para una distancia de 24 pulgadas.
Un obturador F ajustable delante de la ventana A sirve para regular el tamaño de la abertura que deja osar la radiación de manera que la fuerza electromotriz utilizada de la pila termoeléctrica se ajuste estrechamente a una temperatura de la tabla de temperaturas y f.e.m.
Diafragmas de entrada fijos proporcionan el ajuste del intervalo del pirómetro en anchos límites. El extremo superior del intervalo puede ser de 1000 a 1800 C, e incluso superior a 1800 C, si se necesita, para un máximo de f.e.m. de 20 milivoltios.
La escala no es lineal y sigue aproximadamente la ley de la cuarta potencia en la relación entre la temperatura y la f.e.m.
Dado que el extremo inferior de la escala está comprimido, una f.e.m. menor de 1 milivoltio en una amplitud de 20 milivoltios no es útil en la medida de temperaturas. La escala que termina en 1000 C comienza en 450 C y la que termina en 1800 C comienza en 825 C.
En la mitad superior de la amplitud se descubren fácilmente cambios de temperatura de la fuente del orden de 0.1 % del valor medido.
El tiempo requerido para conseguir el equilibrio después de un cambio grande y rápido de temperatura de la fuente depende de la capacidad calorífica del receptor y de la rapidez con la que disipa el calor. Este tiempo de respuesta en el instrumento que hemos descrito es de 1 a 10 segundos, según el tamaño del receptor.
b
. TIPO LENTEEste pirómetro está formado por una lente de pyrex, sílice o fluoruro de calcio que concentra la radiación del objeto caliente en una pila termoeléctrica formada por varios termopares de Pt - Pt Rd de pequeñas dimensiones y montados en serie. La radiación está enfocada incidiendo directamente en las uniones caliente de los termopares. La f.e.m. que proporciona la pila termoeléctrica depende de la diferencia de temperaturas entre la unión caliente (radiación procedente del objeto enfocado) y la unión frío. Esta última coincide con la de la caja del pirómetro, es decir, con la temperatura ambiente. La compensación de este se lleva a cabo mediante una resistencia de níquel conectada en paralelo con los bornes de conexión del pirómetro.
La compensación descrita se utiliza para temperaturas ambientales máximas de 120 °C. A mayores temperaturas se emplean dispositivos de refrigeración por aire o por agua que disminuyen la temperatura de la caja en unos 10 a 40 °C por debajo de la temperatura ambiente.
En la medida de bajas temperaturas la compensación se efectúa utilizando además una resistencia termostática adicional que mantiene constante la temperatura de la caja en unos 50 °C, valor que es un poco más alto que la temperatura ambiente que pueda encontrarse y lo suficientemente bajo como para reducir apreciablemente la diferencia de temperatura útil. El pirómetro puede apuntar al objeto bien directamente, bien a través de un tubo de mira abierto (se impide la llegada de radiación de otras fuentes extrañas) o cerrado (medida de temperatura en baños de sales para tratamientos térmicos, hornos)
Los tubos pueden ser metálicos o cerámicos. Los primeros son de acero inoxidable o aleaciones metálicas resistentes al calor y a la corrosión y se emplean temperaturas que no superan generalmente los 1100 °C.
Permiten una respuesta más rápida a los cambios de temperatura que los tubos cerámicos. Los tubos cerámicos se utilizan hasta 1650 °C.

 (1)
(1)




































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}